DigiTac: A DIGIT-TacTip Hybrid Tactile Sensor for
Comparing Low-Cost High-Resolution Robot Touch
Nathan F. Lepora, Yijiong Lin, Ben Money-Coomes, John Lloyd
Department of Engineering Mathematics & Bristol Robotics Laboratory,
University of Bristol, UK
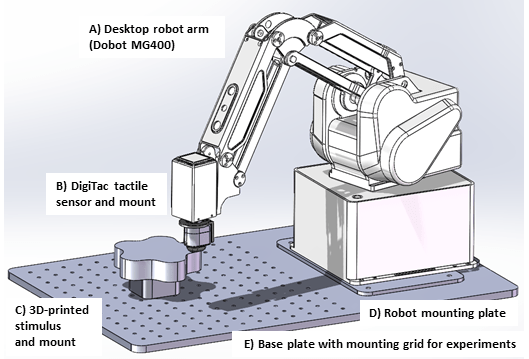
Abstract: Deep learning combined with high-resolution tactile sensing could lead to highly capable dexterous robots. Here we customize the DIGIT low-cost high-resolution tactile sensor (Facebook AI Research and GelSight) to have a 3D-printed sensing surface based on the TacTip family of soft biomimetic optical tactile sensors. The DIGIT-TacTip (DigiTac) enables direct comparison between these distinct tactile sensor types. We introduce a tactile robot system comprising a desktop arm, mounts and 3D-printed test objects. We use tactile servo control to compare the DIGIT, DigiTac and TacTip for edge- and surface-following over 3D-shapes. All three sensors performed similarly at pose prediction, but their constructions led to differing performances at servo control, offering guidance for researchers selecting or innovating tactile sensors.

DigiTac design
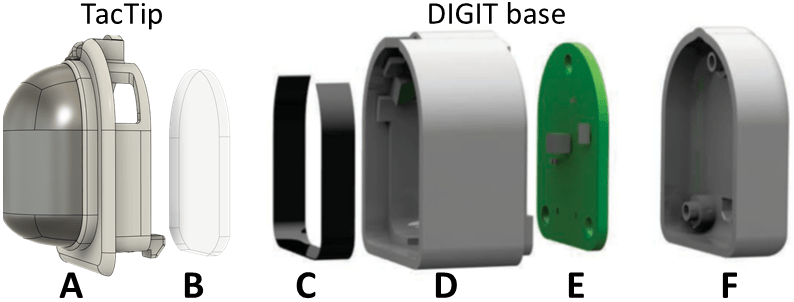
A) 3D-printed TacTip, B) acrylic window, C) lighting PCB, D) plastic housing, E) camera PCB, F) back housing.
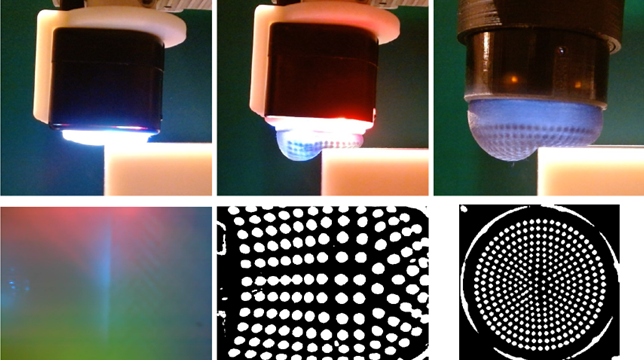
DIGIT
DigiTac
TacTip
Compare via Tactile Servoing – Edge Following
Compare via Tactile Servoing – Surface Following
Conclusions
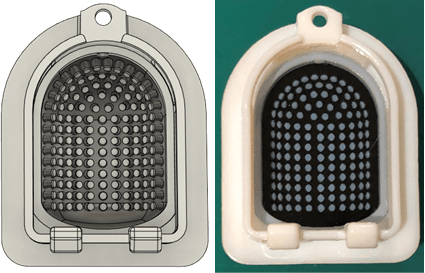
• Adapted the DIGIT to have a TacTip sensing surface (DigiTac)
• DIGIT, DigiTac, TacTip performed well at edge and surface pose prediction; typically, ~0.1mm and ~1deg accuracy.
• Compared on tactile servo control tasks:
1. Edge following: Similar performance
2. Surface following: Only DigiTac and TacTip could complete
• The main difference between the sensors is that the DIGIT sensing surface is flat and fairly inelastic compared to the soft curved sensing surface of the TacTip, which was more suited to servo control tasks.



Citation
@article{lepora2022digitac,
title={DigiTac: A DIGIT-TacTip Hybrid Tactile Sensor for Comparing Low-Cost High-Resolution Robot Touch},
author={Lepora, Nathan F. and Lin, Yijiong and Money-Coomes, Ben and Lloyd, John},
journal={IEEE Robotics and Automation Letters},
year={2022},
doi={10.1109/LRA.2022.3190641}
}