2025
Educational SoftHand-A: Building an Anthropomorphic Hand with Soft Synergies using LEGO MINDSTORMS
J Lepora, H Li, E Psomopoulou, N Lepora (2025) IROS
Tactile Robotics: Past and Future
N Lepora (2025) International Journal of Robotics Research
Classification of Vision-Based Tactile Sensors: A Review
H Li, Y Lin, C Lu, M Yang, E Psomopoulou, N Lepora (2025) IEEE Sensors
Preprint: arXiv

Tactile SoftHand-A: 3D-Printed, Tactile, Highly-underactuated, Anthropomorphic Robot Hand with an Antagonistic Tendon Mechanism
H Li, C Ford, C Lu, Y Lin, M Bianchi, M Catalano, E Psomopoulou, N Lepora (2025) International Journal of Robotics Research
Open Access
Project page: github.com/SoutheastWind/Tactile_SoftHand_A
StereoTacTip: Vision-Based Tactile Sensing With Biomimetic Skin-Marker Arrangements
C Lu, K Tang, X Hui, H Li, S Nam, N Lepora (2025) IEEE/ASME Transactions on Mechatronics
Preprint: arXiv

NeuralTouch: Neural Descriptors for Precise Sim-to-Real Tactile Robot Control
Y Lin, B Deng, C Lu, M Yang, E Psomopoulou, N Lepora (2025) In submission
TacFinRay: Soft Tactile Fin-Ray Finger with Indirect Tactile Sensing Applied to Robust Grasping
S Nam, B Deng, LY Lee, J Rossiter, N Lepora (2025) IEEE Robotics Automation Letters
SimShear: Sim-to-Real Shear-based Tactile Servoing
KMA Freud, Y Lin, N Lepora (2025) Conference on Robot Learning (CoRL)
Text2Touch: Tactile In-Hand Manipulation with LLM-Designed Reward Functions
H Field, M Yang, Y Lin, E Psomopoulou, D Barton, N Lepora (2025) Conference on Robot Learning (CoRL)
Project website: hpfield.github.io/text2touch-website
Guest Editorial Special Collection on Tactile Robotics
S Luo, N Lepora, W Yuan, K Althoefer, G Cheng, R Dahiya (2025) IEEE Transactions on Robotics

Tactile Robotics: An Outlook
S Luo, N Lepora, W Yuan, K Althoefer, G Cheng, R Dahiya (2025) IEEE Transactions on Robotics

Shear-based Grasp Control for Multi-fingered Underactuated Tactile Robotic Hands
C Ford, H Li, M Catalano, M Bianchi, E Psomopoulou, N Lepora (2025) IEEE Transactions on Robotics
Preprint: arXiv
Design and Benchmarking of A Multi-Modality Sensor for Robotic Manipulation with GAN-Based Cross-Modality Interpretation
D Zhang, W Fan, J Lin, H Li, Q Cong, W Liu, N Lepora, S Luo (2025) IEEE Transactions on Robotics
Preprint: Kings College server
Integrating Human-Like Impedance Regulation and Model-Based Approaches for Compliance Discrimination via Biomimetic Optical Tactile Sensors
G Pagnanelli, L Zinelli, N Lepora, M Catalano, A Bicchi, M Bianchi (2025) IEEE Transactions on Robotics
Snap-it, Tap-it, Splat-it: Tactile-Informed 3D Gaussian Splatting for Reconstructing Challenging Surfaces
M Comi, A Tonioni, M Yang, J Tremblay, V Blukis, Y Lin, N Lepora, L Aitchison (2025). International Conference on 3D Vision (3DV)
Also see: webpage
Data-driven compliance discrimination via biomimetic soft optical tactile sensors: implementation and benchmarking with a model-based approach
P Susini, G Pagnanelli, S Nam, N Lepora, M Bianchi (2025) IEEE Robotics and Automation Letters
Enabling Intrinsic Tactile Sensing with Soft Optical Tactile Sensors
L Marcello, G Pagnanelli, N Lepora, M Bianchi (2025) 33rd Mediterranean Conference on Control and Automation (MED)
Fin-A-Rays: Expanding Soft Gripper Compliance via Discrete Arrays of Flexible Structures
LY Lee, S Terrile, S Nam, T Liang, N Lepora, J Rossiter (2025) Soft Robotics
ViTacGen: Robotic Pushing with Vision-to-Touch Generation
Z Wu, Y Lin, Y Zhao, X Zhang, Z Chen, N Lepora, S Luo (2025) IEEE Robotics and Automation Letters
Training Tactile Sensors to Learn Force Sensing from Each Other
S Luo, Z Chen, N Ou, X Zhang, Z Wu, Y Zhao, Y Wang, N Lepora, L Jamone, J Deng
A Neuromorphic Tactile System for Reliable Braille Reading in Noisy Environments
X Xu, N Lepora, B Ward-Cherrier (2025) IEEE Robotics and Automation Letters
General Force Sensation for Tactile Robot
Z Chen et al (2025) Submitted
IQM-Vis: A user-centric python toolbox for visualising and evaluating image quality metrics
M Clifford, A Hepburn, R Kleinlein, J Vila-Tomás, P Hernández-Cámara (2025) SoftwareX
2024
The future lies in a pair of tactile hands
N Lepora (2024) Science Robotics
Pose and shear-based tactile servoing
J Lloyd, N Lepora (2024) International Journal of Robotics Research
Preprint: arXiv
Also see: webpage
Cover image: IJRR Vol 43 (7) June 2024
Based on the technical report: A pose and shear-based tactile robotic system for object tracking, surface following and object pushing

AnyRotate: Gravity-Invariant In-Hand Object Rotation with Sim-to-Real Touch
M Yang, C Lu, A Church, Y Lin, C Ford, H Li, E Psomopoulou, D Barton, N Lepora (2024) Conference on Robot Learning (CoRL)
Preprint: arXiv
Project page: maxyang27896.github.io/anyrotate/
DexiTac: Soft Dexterous Tactile Gripping
C Lu, K Tang, M Yang, T Yue, H Li, N Lepora (2024) IEEE/ASME Transactions on Mechatronics
Preprint: arXiv
Tactile control for object tracking and dynamic contour following
K Aquilina, D Barton, N Lepora (2024) Robotics and Autonomous Systems
Open access
Coarse-to-fine Robotic Pushing using Touch, Vision and Proprioception
B Deng, Y Lin, M Yang, N Lepora (2024) IEEE Robotics and Automation Letters
Preprint: Bristol
TacPalm: A soft gripper with a biomimetic optical tactile palm for stable precise grasping
X Zhang, T Yang, D Zhang, NF Lepora (2024) IEEE Sensors Journal
Preprint: arXiv
BioTacTip: A Soft Biomimetic Optical Tactile Sensor for Efficient 3D Contact Localization and 3D Force Estimation
H Li, S Nam, Z Lu, C Yang, E Psomopoulou, N Lepora (2024) IEEE Robotics and Automation Letters
Preprint: arXiv
Best poster award: ICRA 2024 ViTac Workshop

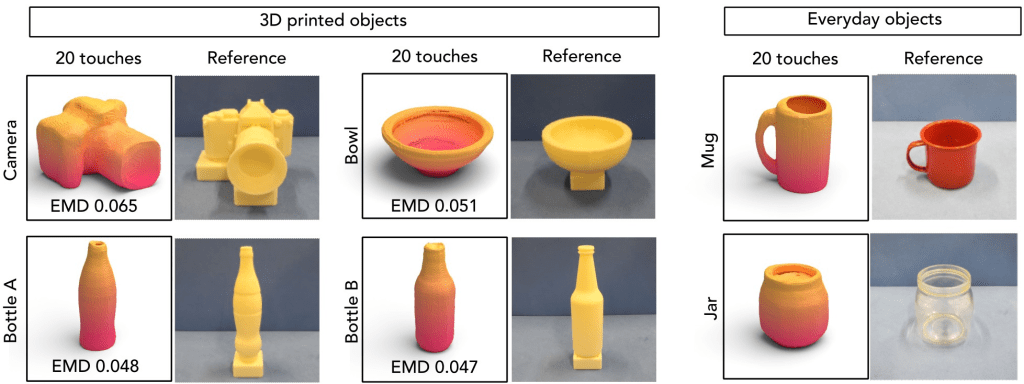
TouchSDF: A DeepSDF Approach for 3D Shape Reconstruction using Vision-Based Tactile Sensing
M Comi, Y Lin, A Church, A Tonieni, L Aitcheson, N Lepora (2024) IEEE Robotics & Automation Letters
Preprint: arXiv
Also see: webpage
Efficient Tactile Sensing-based Learning from Limited Real-world Demonstrations for Dual-arm Fine Pinch-Grasp Skills
X Mao, Y Xu, R Wen, M Kasaei, W Yu, E Psomopoulou, N Lepora, Z Li (2024) IEEE Robotics and Automation Letters
Preprint: arXiv
ViTacTip: Design and Verification of a Novel Biomimetic Physical Vision-Tactile Fusion Sensoor
W Fan, H Li, W Si, S Luo, N Lepora, D Zhang (2024) ICRA
Visual-Tactile Robot Grasping Based on Human Skill Learning from Demonstrations Using a Wearable Parallel Hand Exoskeleton
Z Lu et al (2024) ICRA
TacShade: A New 3D-Printed Soft Optical Tactile Sensor Based on Light, Shadow and Grey Scale for Shape Reconstruction
Z Lu et al (2024) ICRA
2023
Sim-to-Real Model-Based and Model-Free Deep Reinforcement Learning for Tactile Pushing
M Yang, Y Lin, A Church, J Lloyd, D Zhang, D Barton, N Lepora (2023) IEEE Robotics & Automation Letters
Preprint: arXiv
Also see: webpage
Bi-Touch: Bimanual Tactile Manipulation with Sim-to-Real Deep Reinforcement Learning
Y Lin, A Church, M Yang, H Li, J Lloyd, D Zhang, N Lepora (2023) IEEE Robotics & Automation Letters
Preprint: arXiv
Also see: webpage
TacMMs: Tactile Mobile Manipulators for Warehouse Automation
Z He, X Zhang, S Jones, S Hauert, D Zhang, N Lepora (2023) IEEE Robotics & Automation Letters
Preprint: arXiv
Also see: webpage
Attention for Robot Touch: Tactile Saliency Prediction for Robust Sim-to-Real Tactile Control
Y Lin, M Comi, A Church, D Zhang, N Lepora (2023) IROS
Preprint: arXiv
Also see: webpage
Tactile-Driven Gentle Grasping for Human-Robot Collaborative Tasks
C Ford, H Li, J Lloyd, M Catalano, M Bianchi, E Psomopoulou, N Lepora (2023) ICRA
Preprint: arXiv
Tac-VGNN: A Voronoi Graph Neural Network
for Pose-Based Tactile Servoing
W Fan, M Yang, Y Xing, N Lepora, D Zhang (2023) ICRA
Preprint: arXiv
An overview of robotic grippers
T Cairnes, C Ford, E Psomopoulou, N Lepora (2023) IEEE Potentials
Preprint: arXiv
Incipient Slip Detection with a Biomimetic Skin Morphology
D Córdova Bulens et al (2023) IROS
Model-Based Compliance Discrimination via Soft Tactile Optical Sensing and Optical Flow Computation: A Biomimetic Approach
G Pagnanelli et al (2023) IEEE Robotics & Automation Letters
Digital Twin-Driven Mixed Reality Framework for Immersive Teleoperation With Haptic Rendering
W Fan et al (2023) IEEE Robotics & Automation Letters
Visual-Tactile Robot Grasping based on Human Skill Learning from Demonstrations using A Wearable Parallel Hand Exoskeleton
Z Lu, et al (2023) IEEE Robotics & Automation Letters
Towards Living Machines: future trends of tactile sensing, grasping & social robotics
V Vouloutsi et al (2023) Bioinspiration & Biomimetics
2022
Tactile Gym 2.0: Sim-to-real Deep Reinforcement Learning for Comparing Low-cost High-Resolution Robot Touch
Y Lin, J Lloyd, A Church, N Lepora (2022) IEEE Robotics & Automation Letters
Preprint: arXiv
Open software: tactile-gym
Also see: webpage
BRL/Pisa/IIT SoftHand: A Low-cost, 3D-Printed, Underactuated, Tendon-Driven Hand with Soft and Adaptive Synergies
H Li, C Ford, M Bianchi, M Catalano, E Psomopoulou, N Lepora (2022) IEEE Robotics & Automation Letters
Preprint: arXiv
Open hardware: BPI-SoftHand
Also see: webpage
Artificial SA-I and RA-I Afferents for Tactile Sensing of Ridges and Gratings
N Pestell, T Griffith, N Lepora (2022) Journal of the Royal Society Interface
Preprint: arXiv
Open software: afferents-tactile-gratings-jrsi2022
Open data: data-bris repository
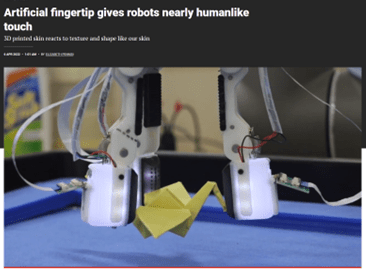
Also see: Royal Society blog article and Science article
Artificial SA-I, RA-I and Vibrational Afferents for Tactile Sensing of Texture
N Pestell, N Lepora (2022) Journal of the Royal Society Interface
Preprint: arXiv
Open software: afferents-tactile-textures-jrsi2022
Open data: data-bris repository
Mapping Mid-Air Haptics With a Low-Cost Tactile Robot
N Alakhawand, W Frier, N Lepora (2022) IEEE Robotics & Automation Letters
Preprint: arXiv
Semi-Supervised Disentanglement of Tactile Contact Geometry from Sliding-Induced Shear
A Gupta, A Church, N Lepora (2022) IROS
Preprint: arXiv
One-Shot Domain-Adaptive Imitation Learning via Progressive Learning Applied to Robotic Pouring
D Zhang, W Fan, J Lloyd, C Yang, N Lepora (2022) IEEE T-ASE
Biomimetic Perception, Cognition, and Control: From Nature to Robots [From the Guest Editors]
C Yang et al (2022) IEEE Robotics & Automation Magazine
Neuromorphic Tactile Edge Orientation Classification in an Unsupervised Spiking Neural Network
F MacDonand et al (2022) Sensors
2021
Soft Biomimetic Optical Tactile Sensing with the TacTip: A Review
N Lepora (2021) IEEE Sensors
Preprint: arXiv
Pose-Based Tactile Servoing: Controlled Soft Touch with Deep Learning
N Lepora, J Lloyd (2021) IEEE Robotics & Automation Magazine
Preprint: arXiv
Goal-Driven Robotic Pushing using Tactile and Proprioceptive Feedback
J Lloyd, N Lepora (2021) IEEE Transactions on Robotics
Preprint: arXiv
Slip Detection for Grasp Stabilization with a Multifingered Tactile Robot Hand
J James, N Lepora (2021) IEEE Transactions on Robotics
Preprint: arXiv
Tactile Sim-to-Real Policy Transfer via Real-to-Sim Tactile Image Translation
A Church, J Lloyd, R Hadsell, N Lepora (2021) Conference on Robot Learning (CoRL)
Open access
Open software: tactile_gym
Also see: webpage
Tactile Image-to-Image Disentanglement of Contact Geometry from Motion-Induced Shear
A Gupta, L Aitcheson, N Lepora (2021) Conference on Robot Learning (CoRL)
Open access
A robust controller for stable 3D pinching using tactile sensing
E Psomopoulou, N Pestell, F Papadopoulos, J Lloyd, Z Doulgeri, N Lepora (2021) IEEE Robotics & Automation Letters
Preprint: arXiv
Towards integrated tactile sensorimotor control in anthropomorphic soft robotic hands
N Lepora et al (2021) ICRA
Preprint: arXiv
Probabilistic Discriminative Models Address the Tactile Perceptual Aliasing Problem
J Lloyd, Y Lin, N Lepora (2021) Robotics: Science & Systems
Preprint: arXiv
Uncertainty-aware deep learning for robot touch: Application to Bayesian tactile servo control
M Vazquez, N Lepora (2021) ICRA
Preprint: arXiv
2020
Optimal deep learning for robot touch: Training accurate pose models of 3d surfaces and edges
N Lepora, J Lloyd (2020) IEEE Robotics & Automation Magazine
Preprint: arXiv
Tactile Model O: Fabrication & testing of a 3d-printed, 3-fingered tactile robot hand
J James, A Church, N Lepora (2020) Soft Robotics
Open access
Cover image: Soft Robotics Vol 8 (5) Oct 2021

Deep Reinforcement Learning for Tactile Robotics: Learning to Type on a Braille Keyboard
A Church, J Lloyd, R Hadsell, N Lepora (2020) IEEE Robotics & Automation Letters
Preprint: arXiv
A Biomimetic Tactile Fingerprint Induces Incipient Slip
J James, S Redmond, N Lepora (2020) IROS
Preprint: arXiv
NeuroTac: A neuromorphic optical tactile sensor applied to texture recognition
B Ward-Cherrier, N Pestell, N Lepora (2020) ICRA
Preprint: arXiv
A Miniaturised Neuromorphic Tactile Sensor integrated with an Anthropomorphic Robot Hand
B Ward-Cherrier, J Conradt, M Catalano, M Bianchi, N Lepora (2020) IROS
Walking on TacTip toes: A tactile sensing foot for walking robots
L Stone, N Lepora, D Barton (2020) IROS
Preprint: arXiv
Learning to Live Life on the Edge: Online Learning for Data-Efficient Tactile Contour Following
L Stone, N Lepora, D Barton (2020) IROS
Preprint: arXiv
Sensing Ultrasonic Mid-Air Haptics with a Biomimetic Tactile Fingertip
N Alakhawand, W Frier, K McAdam Freud, O Georgiou, N lepora (2020) EuroHaptics
Open Access
Sim-to-real transfer for optical tactile sensing
Z Dheng, N Lepora, E Johns (2020) ICRA
Active touch sensing in mammals and robots
T Prescott et al (2020) Chapter in: ‘In the senses: A reference’
2019
From pixels to percepts: Highly robust edge perception and contour following using deep learning and an optical biomimetic tactile sensor
N Lepora et al (2019) IEEE Robotics & Automation Letters
Preprint: arXiv
A sense of touch for the shadow modular grasper
N Pestell, L Cramphorn, F Papadopoulos, N Lepora (2019) IEEE Robotics & Automation Letters
Preprint: bris.ac.uk
Shear-invariant Sliding Contact Perception with a Soft Tactile Sensor
K Aquilina, D Barton, N Lepora (2019) ICRA
Preprint: arXiv
Convolutional autoencoder for feature extraction in tactile sensing
M Polic et al (2019) IEEE RA-L
Editorial Special Issue on Active Perception for Industrial Intelligence
H Liu et al (2019) IEEE Trans. Aut. Science & Engineering
2018
The TacTip family: Soft optical tactile sensors with 3d-printed biomimetic morphologies
B Ward-Cherrier, …, N Lepora (2018) Soft robotics
Open access
Slip detection with a biomimetic tactile sensor
J James, N Pestell, N Lepora (2018) IEEE Robotics & Automation Letters
Open access
Voronoi features for tactile sensing: Direct inference of pressure, shear and location
L Cramphorn, J Lloyd, N Lepora (2018) ICRA
Principal components of touch
K Aquilina, D Barton, N Lepora (2018) ICRA
Dual-modal tactile perception and exploration
N Pestell, J Lloyd, J Rossiter, N Lepora (2018) IEEE Robotics & Automation Letters
TacWhiskers: Biomimetic optical tactile whiskered robots
N Lepora, M Pearson, L Cramphorn (2018) IROS
Active Touch with a Biomimetic 3D-Printed Whiskered Robot
N Lepora, N Burnus, Yi Tao, L Cramphorn (2018) Living Machines
2017
Exploratory tactile servoing with active touch
N Lepora et al (2017) IEEE Robotics and Automation Letters
Model-free precise in-hand manipulation with a 3d-printed tactile gripper
B Ward-Cherrier, N Rojas, N Lepora (2017) IEEE Robotics and Automation Letters
Exploiting sensor symmetry for generalized tactile perception in biomimetic touch
B Ward-Cherrier, L Cramphorn, N Lepora (2017) IEEE Robotics and Automation Letters
Addition of a biomimetic fingerprint on an artificial fingertip enhances tactile spatial acuity
L Cramphorn, B Ward-Cherrier, N Lepora (2017) IEEE Robotics and Automation Letters
Object exploration using vision and active touch
C Yang, N Lepora (2017) IROS
Active sensorimotor control for tactile exploration
U Martinez-Hernandez, … N Lepora (2017) Robotics and Autonomous Systems
2016
Biomimetic active touch with fingertips and whiskers
N Lepora (2016) IEEE Transactions on Haptics
Superresolution with an optical tactile sensor
N Lepora, B Ward-Cherrier (2015) IROS
Tactile manipulation with a TacThumb integrated on the open-hand M2 gripper
B Ward-Cherrier, L Cramphorn, N Lepora (2016) IEEE Robotics and Automation Letters
Tactile quality control with biomimetic active touch
N Lepora, B Ward-Cherrier (2016) IEEE Robotics and Automation Letters
Tactile manipulation with biomimetic active touch
L Cramphorn, B Ward-Cherrier, N Lepora (2016) ICRA
Biology to Technology in Active Touch Sensing–Introduction to Special Section, IEEE Transactions on Haptics
Active tactile perception, Scholarpedia of Touch
2010-15 robotics
Biomimetics
The state of the art in biomimetics
N Lepora, P Verschure, T Prescott (2013) Bioinspiration & biomimetics
A future of living machines? International trends and prospects in biomimetic and biohybrid systems
T Prescott, N Lepora, P Vershure (2014) Bioinspiration, Biomimetics, and Bioreplication
Living Machines 2012: The First International Conference on Biomimetic and Biohybrid Systems
N Lepora, A Mura, P Verschure, T Prescott (2013) Bioinspiration & biomimetics
Robot touch – iCub fingertip
Tactile superresolution and biomimetic hyperacuity
N Lepora et al (2015) IEEE Transactions on Robotics
Active Bayesian Perception for Simultaneous Object Localization and Identification
N Lepora, U Martinez-Hernandez, T Prescott (2013) Robotics: Science and Systems
Active touch for robust perception under position uncertainty
N Lepora, U Martinez-Hernandez, T Prescott (2013) ICRA
Embodied hyperacuity: Shape and position discrimination with an icub fingertip sensor
N Lepora, U Martinez-Hernandez, …, T Prescott (2012) IROS
Active Bayesian perception and reinforcement learning
N Lepora, U Martinez-Hernandez, G Pezzulo, T Prescott (2013) IROS
Active contour following to explore object shape with robot touch
U Martinez-Hernandez, …, N Lepora (2013) World Haptics Conference
Active Bayesian perception for angle and position discrimination with a biomimetic fingertip
U Martinez-Hernandez, T Dodd, T Prescott, N Lepora (2013) IROS
Robot touch – whiskers
Optimal decision-making in mammals: insights from a robot study of rodent texture discrimination
N Lepora, …, T Prescott (2012) Journal of The Royal Society Interface
Brain-inspired bayesian perception for biomimetic robot touch
N Lepora, …, T Prescott (2012) ICRA
Naive Bayes novelty detection for a moving robot with whiskers
N Lepora, …, Prescott (2010) ROBIO
Naive Bayes texture classification applied to whisker data from a moving robot
N Lepora, … T Prescott (2010) IJCNN
The robot vibrissal system: understanding sensorimotor coordination through biomimetics, chapter
The effect of whisker movement on radial distance estimation (2013) Frontiers in neurorobotics
Tactile discrimination using active whisker sensors (2012) IEEE Sensors Journal
Whiskered texture classification with uncertain contact pose geometry (2012) IROS
Whisker-object contact speed affects radial distance estimation (2010) ROBIO
Neuroscience
Decision Threshold Learning in the Basal Ganglia for Multiple Alternatives
T Griffith, S Baker, N Lepora (2025) Neural Computation
Preprint: arXiv
Relating Human Error–Based Learning to Modern Deep RL Algorithms
M Garibbo, C Ludwig, N Lepora, L Aitchison (2024) Neural Computation
Preprint: arXiv
Feature attention as a control mechanism for the balance of speed and accuracy in visual search
T Griffith, F. Townend, S. Baker, N Lepora (2023) Computational Brain and Behaviour
Degenerate Boundaries for Multiple-Alternative Decisions
S Baker, T Griffith, N Lepora (2022) Nature Communications, open access
Open software: DegenerateBoundaries_NatComm22
Open data: degenerate-boundaries-natcom2022
Learning offline: memory replay in biological and artificial reinforcement learning
E Roscow, R Chua, R Ponte Costa, M Jones, N Lepora (2021) Trends in Neurosciences
Preprint: arXiv
The statistics of optimal decision making: Exploring the relationship between signal detection theory and sequential analysis
T Griffith, SA Baker, N Lepora (2021) Journal of Mathematical Psychology
Threshold Learning for Optimal Decision Making
N Lepora (2016) NeurIPS
Embodied choice: how action influences perceptual decision making
N Lepora, G Pezzulo (2015) PLoS Computational Biology
Probabilistic decision making with spikes: From ISI distributions to behaviour via information gain
J Caballero, N Lepora, K Gurney (2015) PLoS one
The basal ganglia optimize decision making over general perceptual hypotheses
N Lepora, K Gurney (2012) Neural Computation
Efficient fitting of conductance-based model neurons from somatic current clamp
N Lepora, P Overton, K Gurney (2012) Journal of computational neuroscience
A simple method for characterizing passive and active neuronal properties: application to striatal neurons
N Lepora, …, K Gurney (2011) European Journal of Neuroscience
Sensory prediction or motor control? Application of Marr–Albus type models of cerebellar function to classical conditioning
N Lepora, J Porrill, C Yeo, P Dean (2010) Frontiers in computational neuroscience
Capturing dopaminergic modulation and bimodal membrane behaviour of striatal medium spiny neurons in accurate, reduced models
M Humphries, N Lepora, R Wood, K Gurney (2009) Frontiers in computational neuroscience
Nonlinear dynamic modeling of isometric force production in primate eye muscle
S Anderson, N Lepora, J Porrill, P Dean (2010) IEEE Transactions on Biomedical Engineering
Recruitment in retractor bulbi muscle during eyeblink conditioning: EMG analysis and common-drive model
N Lepora, J Porrill, C Yeo, C Evinger, P Dean (2009) Journal of neurophysiology
Evidence from retractor bulbi EMG for linearized motor control of nictitating membrane responses
NF Lepora, …, P Dean (2007) Journal of neurophysiology
Response linearity determined by recruitment strategy in detailed model of nictitating membrane control
E Mavritsaki, N Lepora, J Porrill, C Yeo, P Dean (2007) Biological cybernetics
