Pose and shear-based tactile servoing
John Lloyd and Nathan F. Lepora
School of Engineering Mathematics and Technology,
University of Bristol, UK
Bristol Robotics Laboratory, Bristol, UK
Abstract: Tactile servoing is an important technique because it enables robots to manipulate objects with precision and accuracy while adapting to changes in their environments in real-time. One approach for tactile servo control with high-resolution soft tactile sensors is to estimate the contact pose relative to an object surface using a convolutional neural network (CNN) for use as a feedback signal.
In this paper, we investigate how the surface pose estimation model can be extended to include shear, and utilize these combined pose-and-shear models to develop a tactile robotic system that can be programmed for diverse non-prehensile manipulation tasks.
In future, pose and shear-based tactile servoing could enable many object manipulation tasks and the fully-dexterous utilization of multi-fingered tactile robot hands.

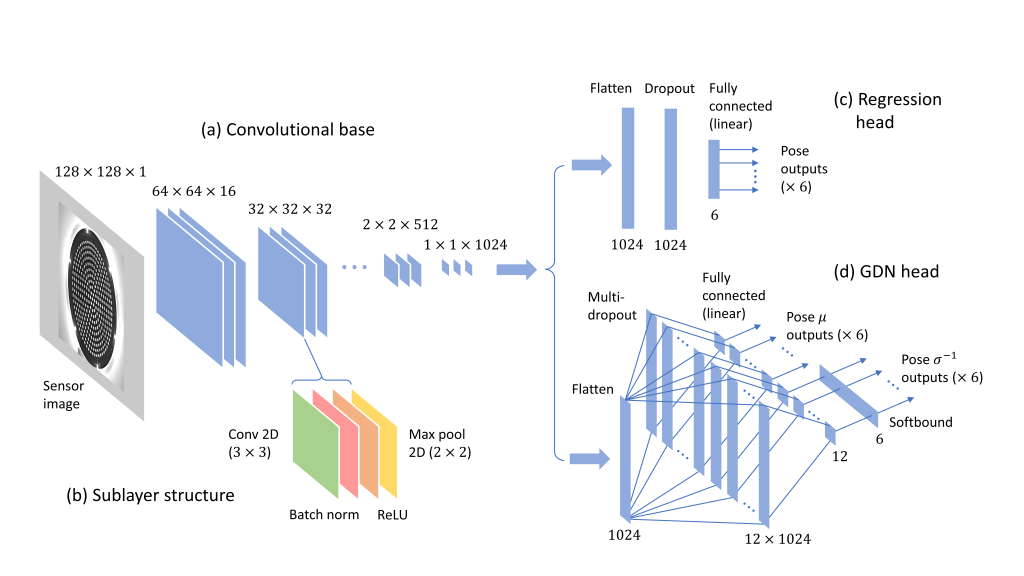
1) Gaussian density neural network model that predicts contact SE(3) pose and post-contact shear with uncertainty
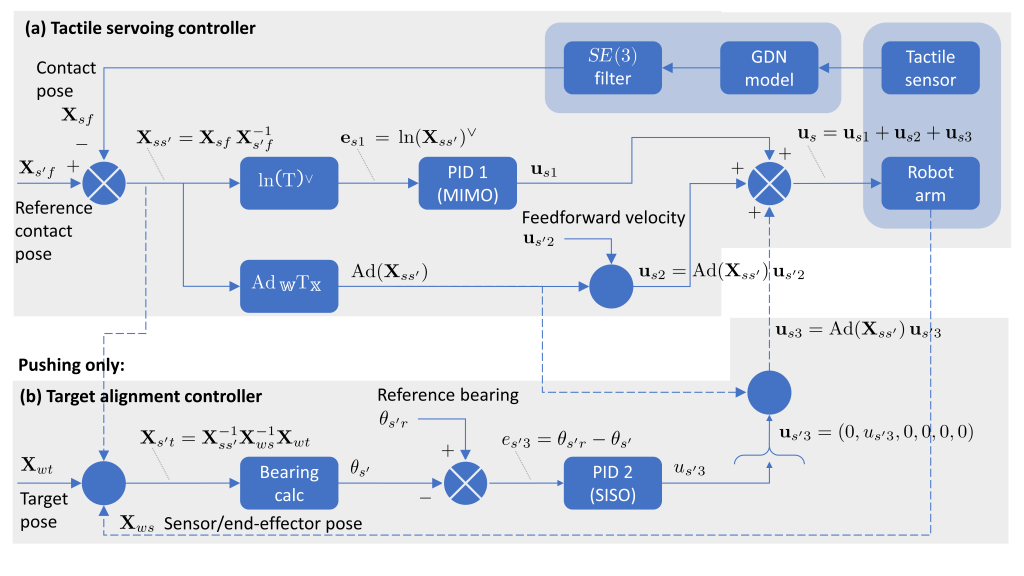
2) Discriminative Bayesian filter that reduces the error and uncertainty of the SE(3) pose-and-shear predictions
3) Feedforward-feedback control methods using velocity control driven by tactile pose-and-shear estimation for tactile servo control, supplemented with controllers for goal-based tasks such as object pushing.
4) Application of these techniques to single- and dual-arms for object tracking, surface following, single-arm pushing and dual-arm pushing.
Demonstrations
Perception algorithm
Control algorithm




Citation
@article{lloyd2023pose,
title={Pose and shear-based tactile servoing},
author={Lloyd, John and Lepora, Nathan F.},
journal={The International Journal of Robotics Research},
year={2023},
doi={}
}