Projects

robot touch
Collaboration with DeepMind
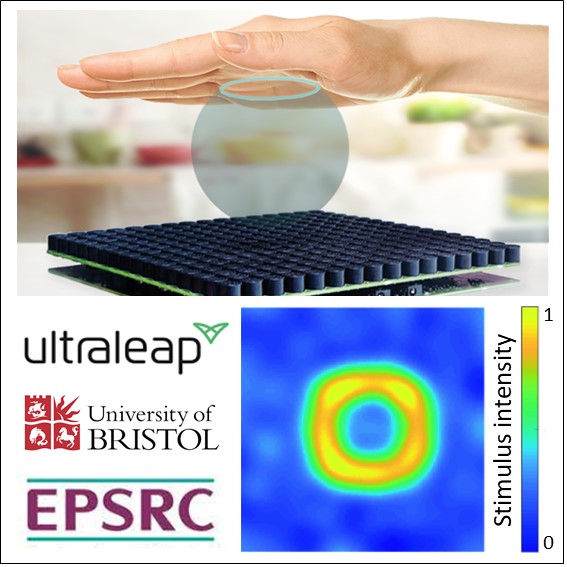
Collaboration with Ultraleap

fully-actuated tactile robot hand
Collaboration with Shadow Robotics
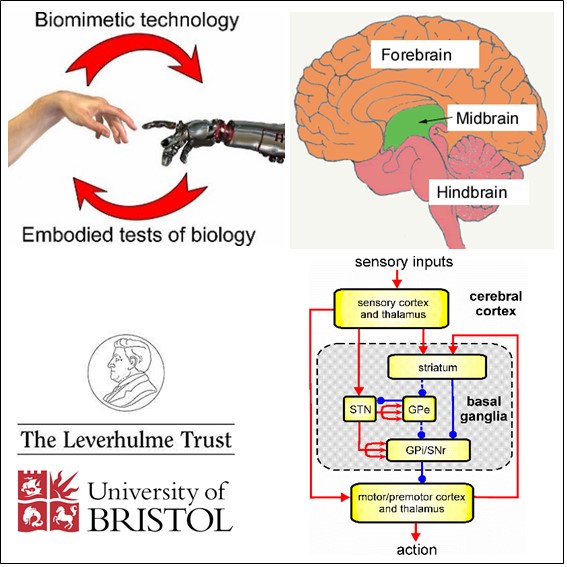
Leverhulme Research Leadership Award
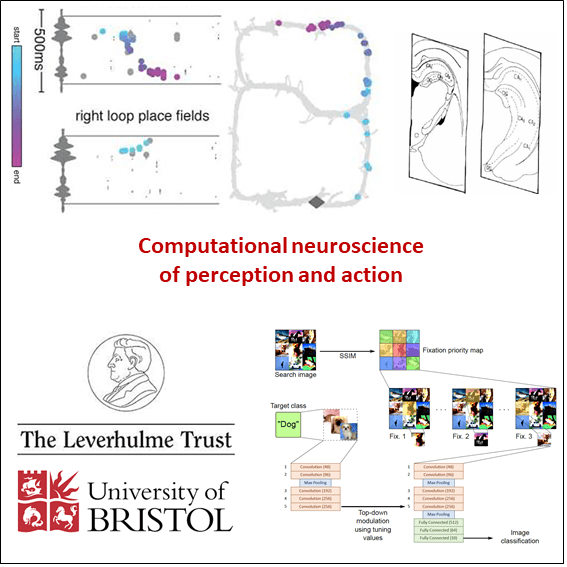
Leverhulme Research Leadership Award
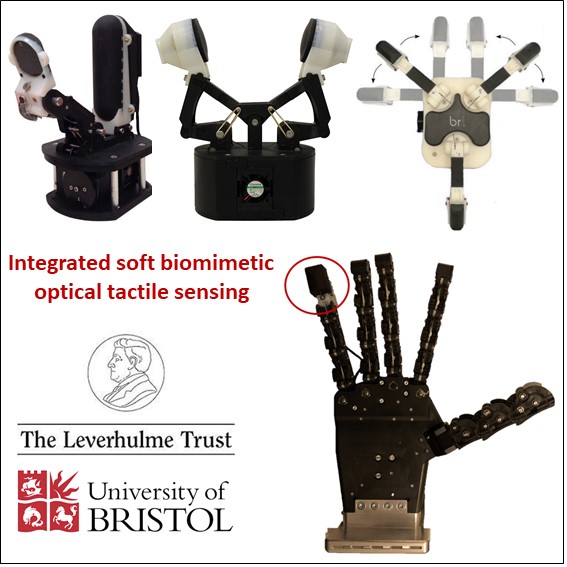
Leverhulme Research Leadership Award

PhD projects
(collaboration with Dave Barton)
PhD project
(completed)
EPSRC first grant
(completed)
